利用分野
工業製品を作る工場では最近特にロボット化が進んできていますが、ロボットで製品や部品をハンドリングする際には、「つかむ」か「吸着する」ことにより固定・位置決めして移載することが一般的です。

エアチャックが主流
「吸着」の場合は真空ポンプを動力源として吸着パッドなどを用いて吸着するわけですが、「つかむ」場合はコンプレッサで作られた圧縮エアを動力源としてエアチャックなどが用いられます。
圧縮エアを用いるとアクチュエータの構造が簡単にできるので、アクチュエータを小型化できるというメリットがあります。
ロボットのように可搬重量の制約がある場合もありますし、可動部を軽くすることは動作速度を上げることにもつながります。
今後の流れ
しかし、エア駆動機器は一般的に消費エネルギーが大きいと言われており、徐々にですが電動機器に置き替わる動きが進んできています。
近年では私の住む静岡市にあるIAI社がエレシリンダという名称の機器販売を始めましたが、これは正にエアシリンダを電気式シリンダに置き換える物です。
電動チャック
電動チャックもIAI社から商品化されており、モータを駆動源とした物と、ソレノイドを駆動源としたソレノイドグリッパーGRSという物が販売されています。
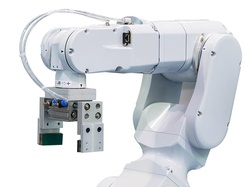
下の写真はモータ駆動のRCP4-GRSMLというタイプですが、価格はかなり高くなります。

下の写真は ソレノイドグリッパーGRSで、価格は2万円台のようですので、十分にエアチャックの代替に成り得るのではないでしょうか。

モータタイプは全体として大きいのですが、ソレノイドグリッパーはコンパクトにまとめられていますので、条件次第ですが使える場面は多いと思います。
また、エアチャックと比べますと把持力が小さいというデメリットはありますが、装置の中で他にエア機器を使用しないということであれば有用だと言えます。
エア機器を使用するためには、エア源が必要というだけではなく、圧力調整機器やエアフィルタなども必要になり、トータルコストが高くなるからです。
ソレノイドチャックを開発
IAI社に対抗するなどと大それたことは全く考えていないのですが、 ソレノイドグリッパー よりも小形の物を作ることができるか挑戦してみたいと考えています。
具体的には把持力は200[gf]=2[N]程度で、開閉は平行ではなく回転タイプにしたいと考えています。
平行開閉の方がニーズが多いとは思いますが、小型のリニアガイドが必要になりますので、開発が難しくなりそうだからです。
概略構造の検討
チャック方向は外径チャックタイプで、閉じる方向にチャックします。チャック状態を継続できなければなりませんので、チャック方向にバネの力を利用して、開く方向をソレノイドにするのが良さそうです。
開状態も保持する必要がありますが、できれば自己保持ソレノイドではなく別の手段で実現したいと考えています。
ソレノイドの場合は動作速度が非常に速いので、開閉時の衝撃が問題になるのではないかと懸念しており、閉じる方向は何とか減速機能を付加したいところです。
開閉状態の検出スイッチは必須ではないかと思いますので、SMC社のシリンダスイッチ(恐らく無理)かメトロール社などのタッチスイッチを取り付けられるようにします。
これから詳細を検討しますので、方針が固まりましたらレポートします。申し訳ありませんが、しばらくお待ちください。
つづく・・・